
Heart Valve Repair
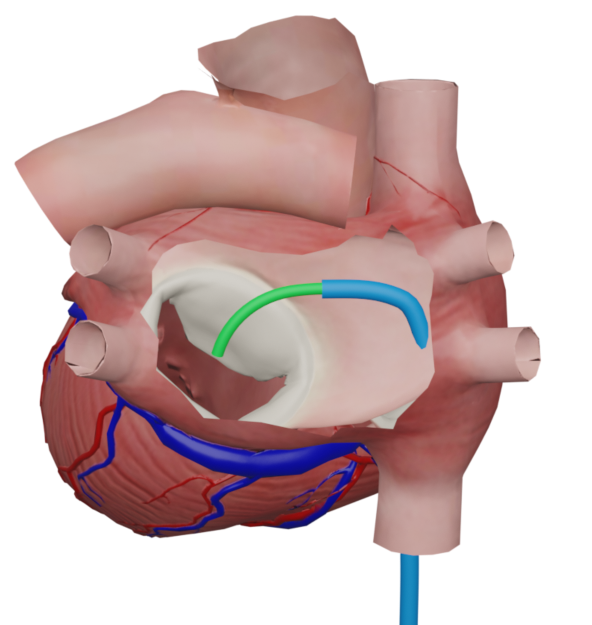
Our overall goal is to convert heart valve repair procedures that are currently performed as open-heart surgery into transcatheter interventions that avoid both the trauma of opening the chest as well as the use of cardiopulmonary bypass. This approach can reduce procedural risk enabling treatment earlier in the disease process and in patients too sick to undergo surgery. Replicating the dexterity and visualization of open surgery at the tip of the catheter inside a beating heart is challenging. Our research is comprised of three main components: the creation of steerable robotic catheters as a platform for valve repair, the development and integration of imaging technologies into the catheter tip and the design of valve repair tools and devices. Our projects span identification of clinical need, idea conception, algorithmic design and prototyping to in vivo testing. We are currently targeting repair of the aortic, mitral and tricuspid valves.
Multi-armed single-port medical robots.
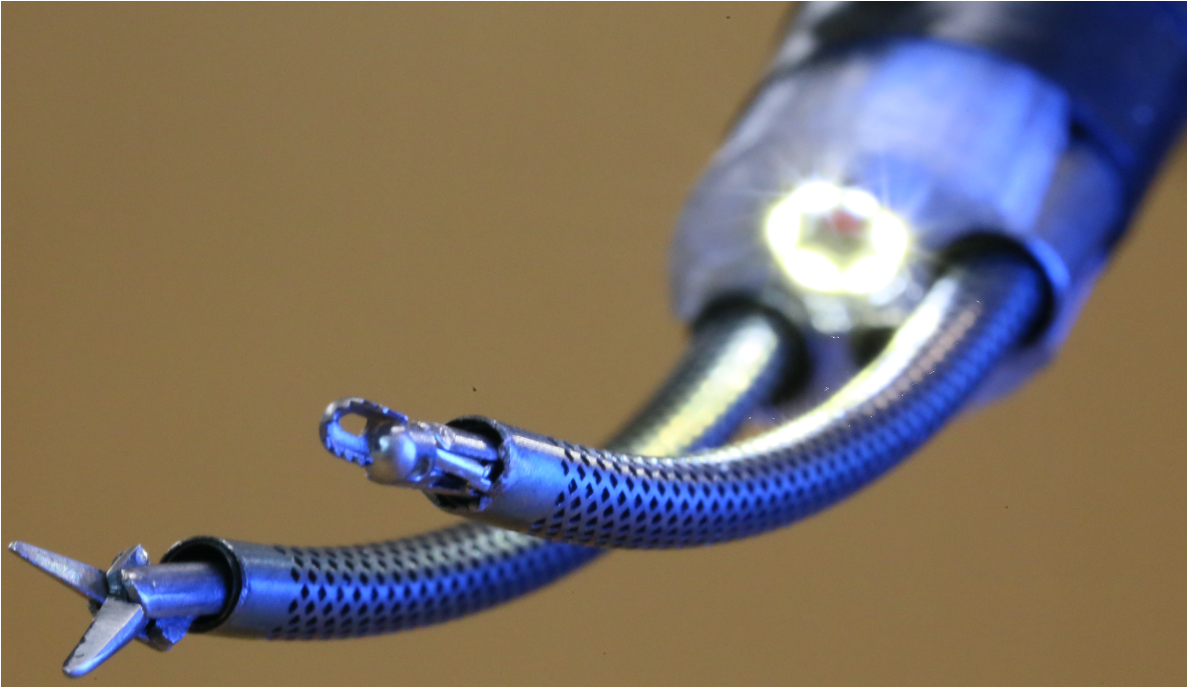
Many surgical tasks require the coordinated use several tools at once. While this is easy to achieve in open surgery, it is more challenging during minimally invasive procedures. In laparoscopy, the use of multiple tools is achieved by inflating the abdomen to create an empty working volume and then inserting tools into this volume through separate incisions spread over the abdomen. In other parts of the body, the surgical site must be reached through a single pathway to avoid damaging surrounding delicate tissues. Examples include brain surgery as well as endoluminal procedures such as trans-oral or trans-anal surgery. Multi-armed robots equipped with endoscopic imaging provide the means to reproduce the coordinated use of several tools as is done in open surgery, but through a single small surgical corridor. Such single-port robots are designed with the arms and endoscope located at the distal end of a sheath that is either straight or steerable. We have developed a two-armed system with a straight sheath for neurosurgical procedures. Unique features of this robot include the high curvatures of the arms and the ability to intraoperatively swap the tools that are inserted through the arms. We have also developed a steerable sheath technology comprised of eccentrically arranged precurved superelastic tubes that serve as the working channels for the robotic arms. The shape of the sheath is controlled by rotating the precurved tubes with respect to the sheath.
Airway stents for tracheobronchomalacia
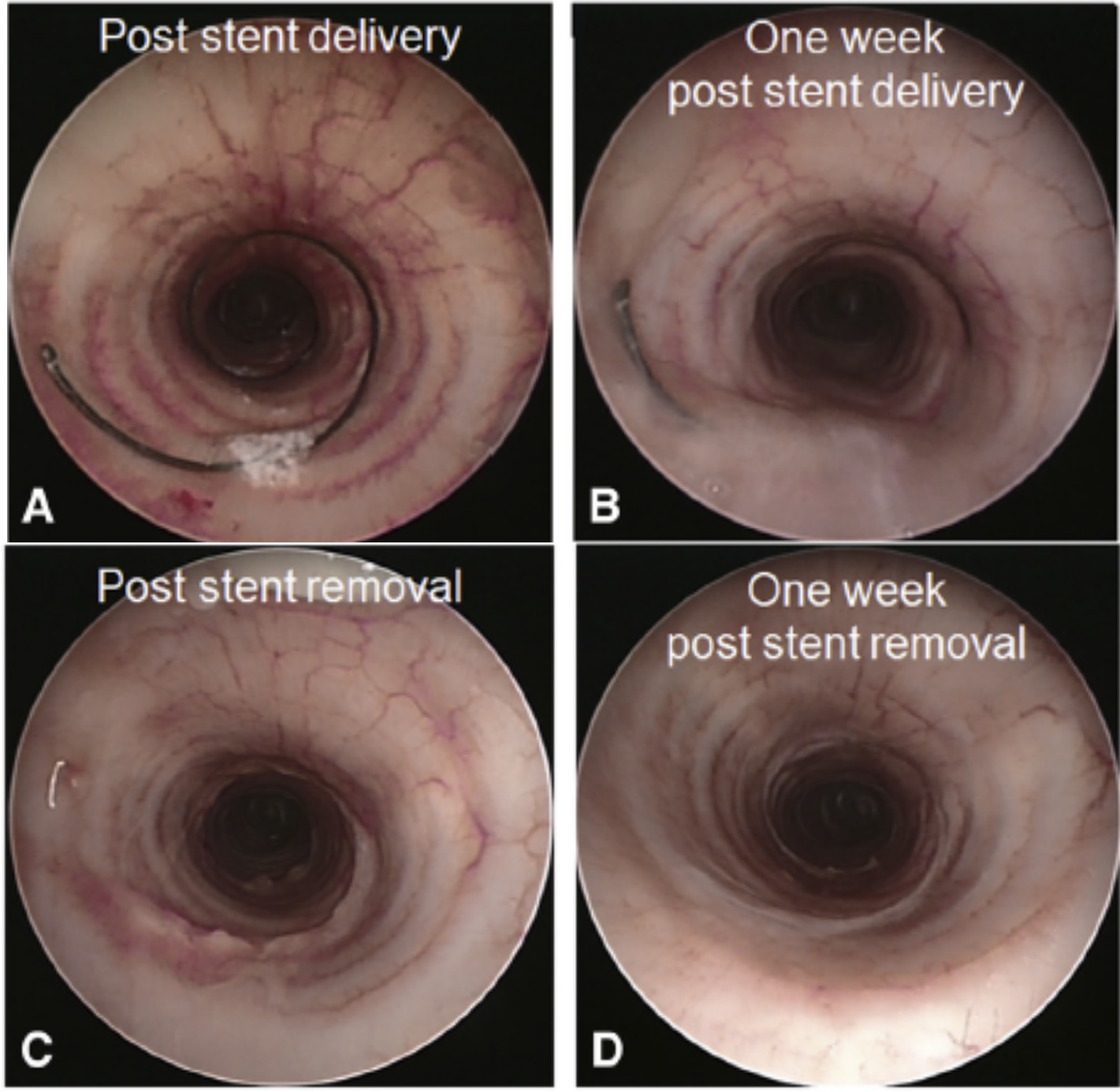
Tracheobronchomalacia is a condition in which a portion of the trachea and bronchi collapse during respiration. While stents have the potential to support the collapsing airway segment, existing designs do not perform well. Current stent types exhibit some combination of the following limitations. They can block mucus transport, slide along the airway during coughing, induce the growth of granulation tissue that can block the airway or become embedded into the tissue such that they cannot be safely removed. Due to these limitations, both pediatric and adult patients must often undergo lengthy open surgical procedures to structurally reinforce the airways. With the goal of eliminating the need for such operations, we have created a helical stent along with delivery and removal tools that address the limitations of existing stent designs. Since the helical coils cover only a small portion of the airway, they do not impede mucus transport. Shaped like the threads of screw on the surface of the airway, the stent resists sliding. The small amount of material in the stent induces a reduced foreign body response. Furthermore, even if the inner surface of the airway grows over the stent, it can be safely removed using our removal tool which unscrews it like a corkscrew from the tissue. We have also developed a version of this stent that can be molded to the shape of the airway during delivery to achieve a patient-specific fit. We are currently refining this technology for commercialization.
Robotic Implants
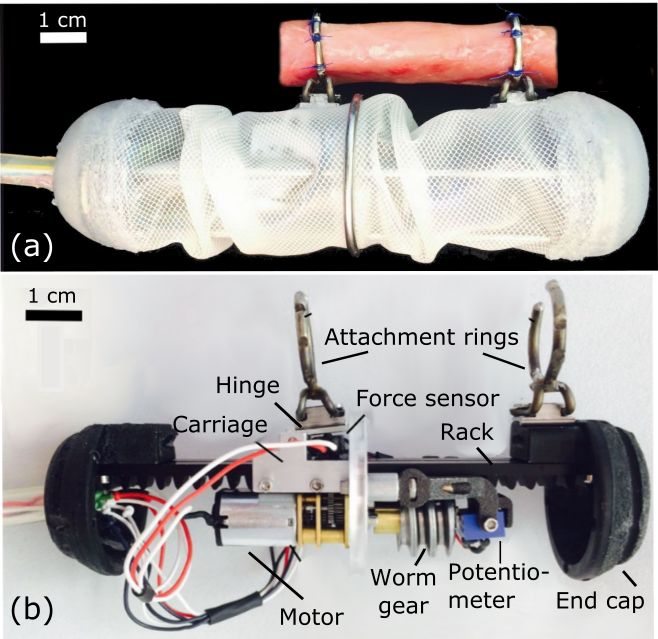
Robotic implants are devices designed to autonomously regulate biological processes inside the body. Potential benefits of these devices include restoration of degraded or missing biological functionality, induction of tissue growth, as well as a reduction in the number of surgeries necessary to treat a patient with a chronic condition. These devices may move through the body or reside in one location and employ their degrees of freedom to interact with tissue structures. For example, they could automatically regulate flow resistance in the vasculature or adjust the length and compliance of tissues. We have developed robotic implants to induce tissue regeneration in tubular organs. Specifically, we have considered the pediatric applications of long gap esophageal atresia and short bowel syndrome. The goal for both applications is to increase the length of the organ by applying controlled traction forces to the tissue over a period of several weeks. Our most recent work has considered how to design implants from a combination of absorbable and non-absorbable materials so that, if they need to be removed from the body, this can be done without surgery.